|
Typen-Bezeichnung
|
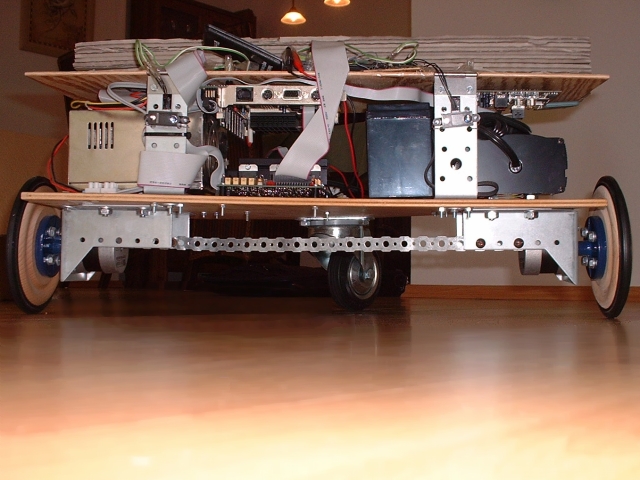
AU/2311 (Autonomous Unit)
|
|
Fertigstellungs-Datum
|
18.06.2002
|
|
Kurzbeschreibung
|
- Automatisches Zurücklegen eines vektoriell vorgegebenen Weges
- Erstellen einer vektoriellen Karte erkannter Hindernisse
- Autonomes Ausweichen vor Hindernissen unter Berücksichtigung erkannter Hindernisse
- Funkübertragung der Telemetrie an einen Windows-PC
|
|
Spannungsversorgung
|
Blei-Akku 12V
|
|
Leistungsaufnahme
|
60W (36W im Standby-Betrieb)
|
|
Sensorik
|
2 x Sharp GP2D02
|
|
Motoren
|
2 x Schrittmotor 500 mNm
|
|
Ausweich-Algorithmus
|
Heuristisch; Vektor-basiert
|
|
Verbindung zur Basisstation
|
TCP / IP über DECT
|
|
Telemetrie
|
Positionsbestimmung durch Auswertung der Motorschritte
|
|
Betriebssystem
|
Linux
|
 Bock
Bock