Robotik-Hobby
Robotik-Hobby
Im Laufe des Studiums haben wir das Robotersystem weiterentwickelt. Die Software auf dem Basisstations-PC wurde auf Windows portiert, und der Roboter selbst bekam einen eigenen Steuercomputer zur Realisierung autonomer Intelligenz. Seit 2003 kann er einen vektoriell vorgegebenen Weg selbständig zurücklegen und vor Hindernissen autonom ausweichen. Dabei kommuniziert er drahtlos mit der Basisstation, um Befehle entgegenzunehmen und Positions- sowie Abstandsdaten zu übermitteln.
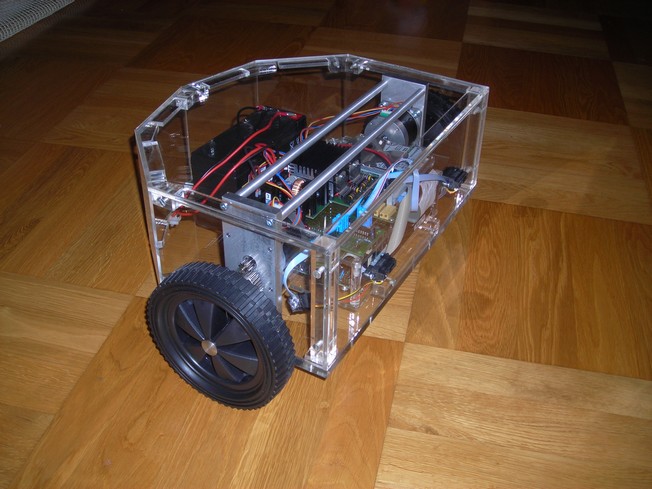
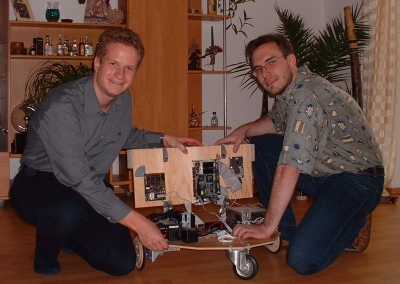
Sein heutiges Gesicht erhielt das Robotersystem 2005, als der Prototyp AU/2311 (Foto oben) durch den Roboter AU/2410 (Foto unten) ersetzt wurde. Anderthalb Jahre lang musste diese Neuentwicklung "blind" fahren, weil erst im Frühjahr 2007 der Treiber für die neuen Abstandssensoren fertig wurde (woraus man schließen könnte, dass Zeit fürs Hobby nach dem Studienabschluss knapp ist).
Bei der Entwicklung des Roboters haben wir auf dedizierte Microcontroller verzichtet und als einzige frei programmierbare Komponente eine General-Purpose-CPU (PentiumII) eingesetzt. Auf dieser läuft unter Linux die Roboter-Firmware zur autonomen Navigation inklusive Sensor-Abfrage und Motorsteuerung sowie zur Kommunikation mit der Basisstation.
Die Funkverbindung zwischen Basisstation und Roboter ist aus historischen Gründen mit DECT realisiert. In den höheren Protokollschichten verwendet sie allerdings TCP/IP, so dass die Ausgestaltung der Kommunikation fast keine Grenzen kennt: Ende 2005 haben wir die Verbindung zwischen Basisstation und Roboter erstmals über das Internet geroutet, so dass der in Bern aufgestellte Roboter von Bonn aus Befehle erhalten konnte.